

A teoria de controle moderno surgiu em meados da década de 1960, em função da necessidade de projetar sistemas de controle mais complexos e precisos como exemplo mísseis e sondas espaciais, onde o controle clássico já não satisfazia estas condições. Com o advento da era espacial com projetos de satélites, a engenharia de controle foi estimulada a buscar soluções, como por exemplo minimizar o peso dos satélites e controla-los de forma mais precisa, pois se tratavam de sistemas multivariáveis. Baseado nisto, o método de domínio do tempo desenvolvido por Lyapunov, Minorsky e outros tem sido objeto de interesse até os dias atuais. Estudos de controle ótimo (L.S Pontryangin e R. Bellman) e robusto também tiveram uma contribuição para o método de domínio do tempo.
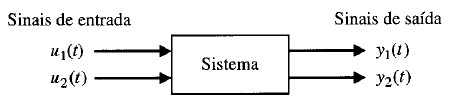
A diferença entre controle moderno e o controle clássico está em sistemas multivariáveis (Multiplas entradas e saídas) e que pode ser variante ou invariante no tempo. No segundo a abordagem é somente uma entrada e uma saída e só pode ser invariante no tempo.
Conceito de Espaço de Estados
O estado de um sistema é um conjunto de variáveis, de modo que o conhecimento dos valores destas e das funções de entrada, junto com as equações que determinam a dinâmica, fornecem estados e saídas futuros deste sistema.
Variáveis de Estado
Variáveis de estado são o menor conjunto de variáveis, x1(t), x2(t)….x(n), que determina o estado do sistema dinâmico.
Vetor de Estados
É um vetor que determina unicamente o estado de um sistema x(t) para qualquer t>0 ou t=0, de modo que o vetor de entrada, u(t), esteja especificado.
Equações no Espaço de Estados
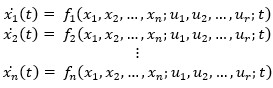
As equações diferenciais que representam a dinâmica do sistema, para serem convertidas em espaço de estados tem que ser na forma linear de primeira ordem para serem representadas na forma matricial, com isso são definidas as variáveis de entrada, estado e saída. Assim são estruturadas da seguinte forma:
- Estrutura da equação diferencial:
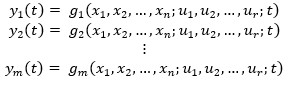
- Estrutura da saída (Equações de medição):
- Formato de espaço de estados:
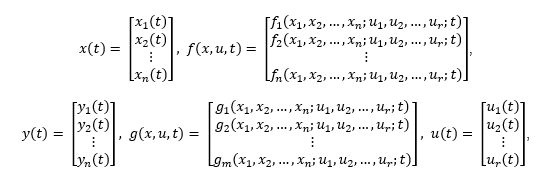
Resultando em:

Uma vez linearizadas em torno de um ponto de operação, então tem-se as seguintes equações de estado e de saída linearizadas:
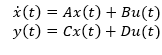
Onde A(t) é chamada de matriz de estado, B(t) matriz de entrada, C(t) matriz de saída, e D(t) matriz de transmissão direta.

Leave a comment